IASLonline NetArt: Theory
Thomas Dreher
History of Computer Art
II. Cybernetics
II.2 Cybernetic Models
- II.2.1 Homeostat
- II.2.2 Memory
- II.2.3 Path Finding
- Illustrations Part I: Cybernetics: PPT / PDF
- Table of Contents
- Bibliography
- Previous Chapter
- Next Chapter
In 1946/47 William Ross Ashby realised a technical system as a model for his theory of homeostasis (see chap. II.1.5). This system offering a theory´s test case inspired in the fifties and sixties artists constructing cybernetic sculptures (see chap. II.3). "Homeostat" is a technical model demonstrating a system´s limited capabilities to adapt itself to environmental conditions. The flow of energy in the technical model is used to demonstrate how the system/environment relation functions in biological systems, for example to maintain the body heat. Cybernetic scientists develop theories valid across systems, construct technical models for them, and compare them with characteristics of creatures: from theory to machine to creature – and back. 1
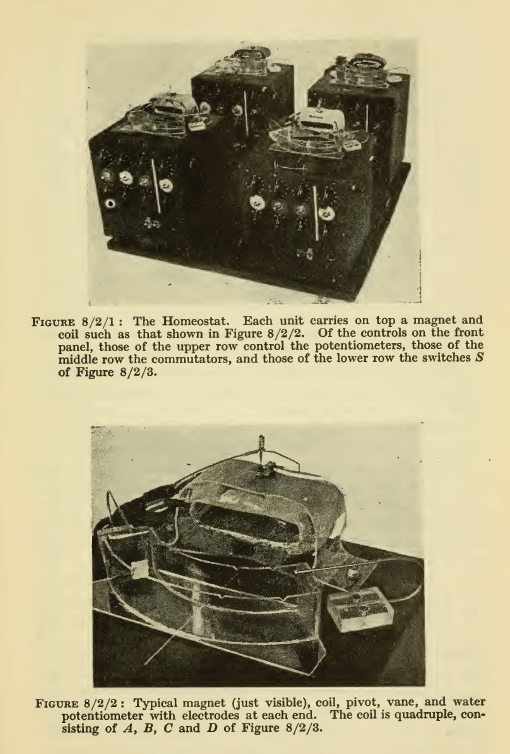
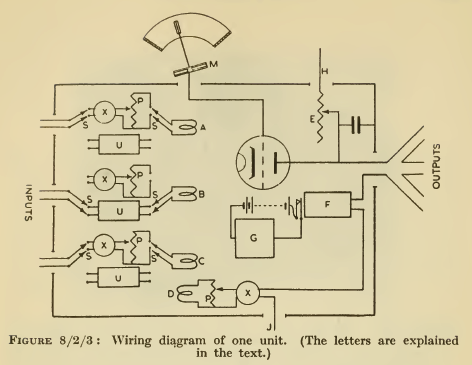
Ashby, William Ross: Homeostat, 1946-47 (Ashby: Design 1960, p.101).
Four units being sensitive to disruptions and compensating them are connected by Ashby to build the system of "Homeostat". On each unit a magnet controls the deflections of a needle. Placed in a conductive liquid the needle reacts to the system´s voltage fluctuations. "Uniselectors" introduce system-internal disturbances by chance-operations. Controllers ("commutators and potentiometers") on the four units make the regulation of energy possible. The system reacts to changing energy flows within its possibilities to execute compensation movements: The output of one unit becomes the input of the next unit. This results in a system behaviour keeping the needle stable in the midst of its swinging possibilities. Ashby designates this self-regulation as "ultrastability". 2
Ashby, William Ross: Homeostat, circuit diagram (Ashby: Design 1960, p.102).
In his presentation of the "Homeostat" in 1952 at the ninth Macy Conference in New York Ashby was faced with expectations that his system should have a "memory" 3 to be able to store previous processes and to use the store to learn not to repeat them. For the participants of the Macy Conferences was a consequence of this expectation and the assertion to be able to realize technically the functions of a concept 4 to ask how the capabilities of memorizing and learning can be implemented technically.
In 1951 Claude Elwood Shannon presented a system with memory at the eighth Macy Conference: The "sensing finger" of the "Maze Solving Machine" 5 memorized previous paths and returned to them if it moved to a blind end. The way to the goal became shorter because after failure the search had not to be started from the beginning, meanwhile Ashby´s "Homeostat" compensated deviations each time as if it had never before done that in the same situations. But Shannon could not present a model with the ability to draw conclusions from elder experiences for new navigation strategies.
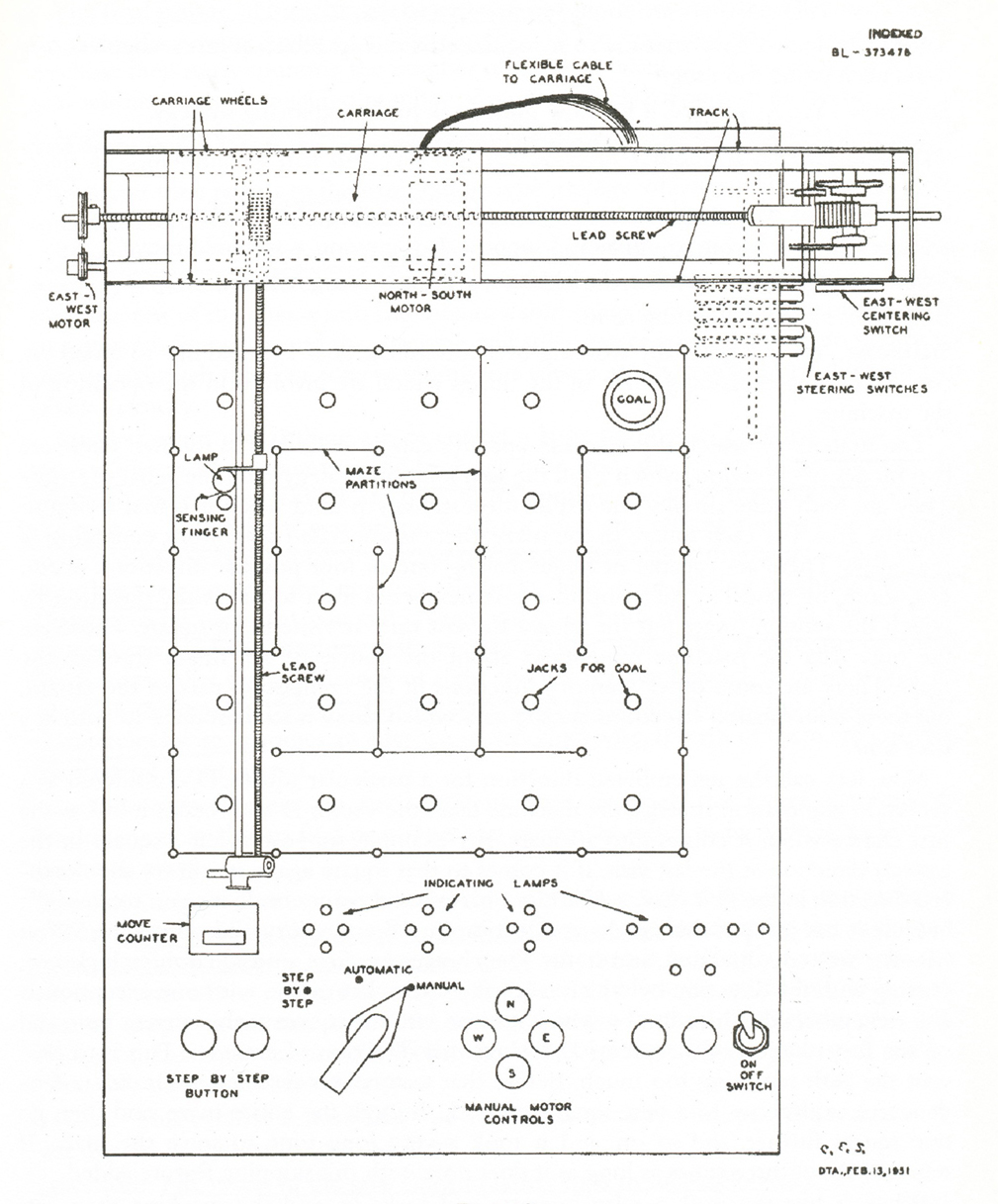
Shannon, Claude Elwood: Maze-Solving Machine, plan (Shannon: Presentation 1951, p.174, figure 8).
In 1948 William Grey Walter constructed his first roboter "Elmer" finding his path between obstacles by self navigation. To construct the robot Walter used radio tubes, switching relays, photocells, and little microphones. Three years later he constructed "CORA" as a robot memorizing obstacles: In its search for a path "CORA" circumvented the positions of obstacles or of test persons. A test person could signal with a whistle to the robot: Don´t move in this not any further leading direction.
Walter, William Grey: Elmer, 1948.
The three-wheel robot construction was not only sensitive to sounds and touch contacts but to light, too: It reacted to reflexes of the light mounted on its covering. A mirror´s reflexes of its own light provoked a dance because the mechanism to change its direction caused repeated, staggered motions. 6 The progress from the "Machina Speculatrix" "Elmer" to the "Machina Docilis" 7 demonstrated "CORA" with its capability to memorize obstacles and to find itself the path to its garage with electricity supply: "CORA" is seen as a precursor of "artificial intelligence". 8
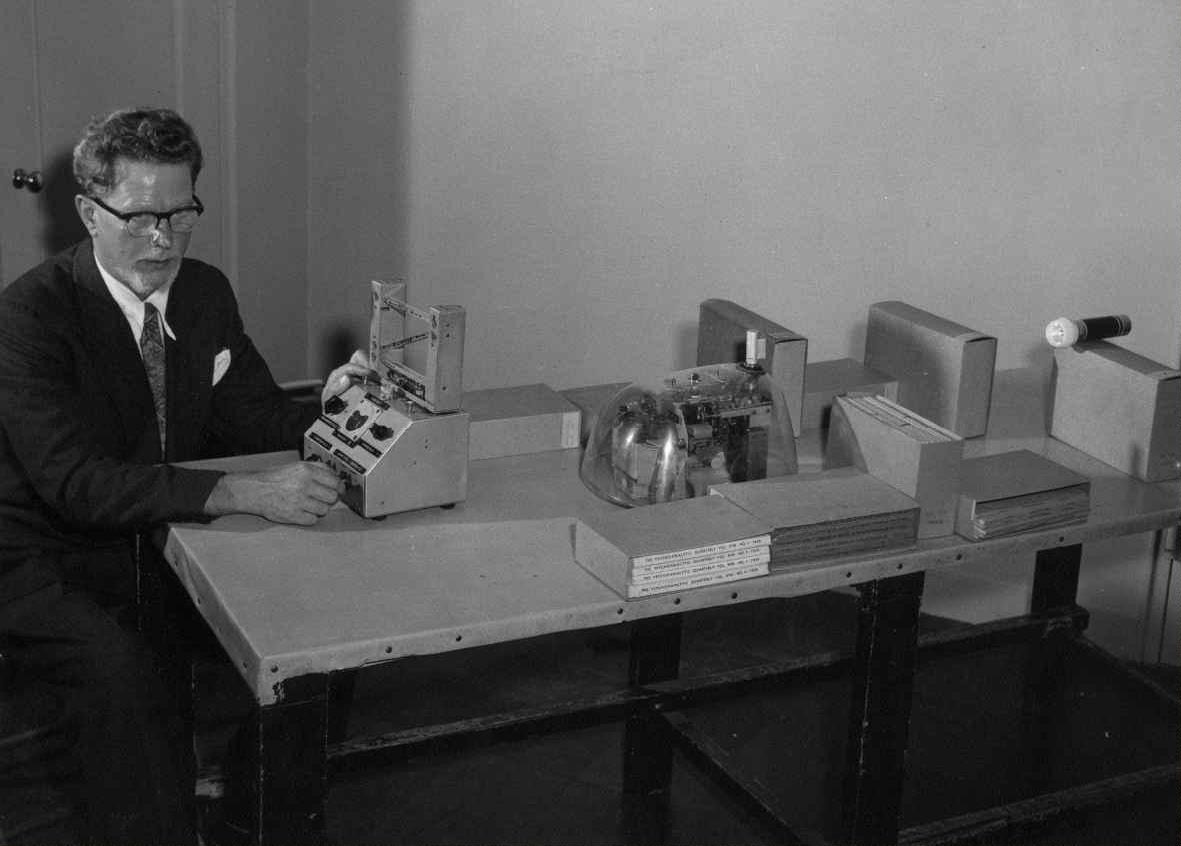
Walter, William Grey: Cora, model for demonstrations on a table, 1951 (constructed by Bunny Warren for the Festival of Britain in London, Exhibition of Science, Science Museum, South Kensington, 1951).
In the book "The Living Brain", published in 1953, Walter compared "an electrical oscillation at low frequency" of "CORA" with "feedback circuits from cell-group to cell-group" in the brain. 9 He measured brain events as electroencephalogram in sequential phases of time. So it became recognizable if an event was forgotten, memorized, or processed. 10
In the forties and fifties Shannon, Ashby and Walter developed technical constructs for cybernetic theories anticipating later developed programs for computers.
Wiener designated processes of calculators from the abacus to the digital computer as "computing". 11 The cybernetic models featured in this chapter present concepts of computing processes in systems reacting to external events in a state of differentiation becoming relevant for early artistic projects for computers (see chap.II.3.1, chap. II.3.2.3).
Dr. Thomas Dreher
Schwanthalerstr. 158
D-80339 München
Germany.
Homepage
with numerous articles on art history since the sixties, a. o. on Concept Art and Intermedia
Art.
Copyright © (as defined in Creative
Commons Attribution-NoDerivs-NonCommercial 1.0) by the author, October
2011 (German version)/August 2013 (English translation).
This work may be copied in noncommercial contexts if proper credit is
given to the author and IASL online.
For other permission, please contact IASL
online.
Do you want to send us your opinion or a tip? Then send us an e-mail.
Annotations
1 Ashby: Design 1960, p.98s. on the "homeostat" as an "analogue computer" for the research of "ultrastable systems", and Ashby: Variety 1958, chap. The Message of Zero Entropy on "the homeostatic mechanism" to maintain the body heat. back
2 Ashby: Design 1960, p.98s.,103s.; Pickering: Brain 2010, p.101-106. back
3 Ashby: Homeostasis 1952, p.104/615s.; Bluma: Wiener 2005, p.156s. back
4 Ashby: Homeostasis 1952, S.107f./618 includes the following discussion contribution by Walter Pitts: "At the very beginning of these meetings, the question was frequently under discussion of whether a machine could be built which could do a particular thing, and, of course, the answer, which everybody has realized by now, is that as long as you definitely specify what you want the machine to do, you can, in principle, build a machine to do it." back
5 Bluma: Wiener 2005, p.157; Shannon: Presentation 1951. back
6 Walter: Brain 1961, p.241: "turn- and- push manoevre".
On "Elmer": Hoggett: Elmer 2009.
On "CORA": Hoggett: CORA 2009; Pickering: Brain 2010, p.64-67;
Walter: Brain 1961, p.118,155ss.,245-250. back
7 Pickering: Brain 2010, p.64; Walter: Brain 1961, p.155ss.,241-244. back
8 Holland: Walter 1997.
For Reuben Hoggett there was not only a static object to demonstrate functions
of a machinic brain but a robot, too, with an integration of that machinic
brain (Hoggett: CORA 2009). back
9 Walter: Brain 1961, p.163. back
10 Burnham: Modern Sculpture 1978, p.331,334s.; Pickering: Brain 2010, p.64ss. back
11 Wiener: Cybernetics 1949, p.20. back
[ Table of Contents | Bibliography | Next Chapter ]
[ Top | Index NetArt | NetArt Theory | Home ]