IASLonline NetArt: Theorie
Thomas Dreher
Geschichte der Computerkunst
II. Kybernetik
II.2 Kybernetische Modelle
- II.2.1 Homeostat
- II.2.2 Gedächtnis
- II.2.3 Wegsuche
- Inhaltsverzeichnis
- Bibliographie
- voriges Kapitel
- nächstes Kapitel
William Ross Ashby realisierte 1946/47 für seine Theorie der Homöostase (s. Kap. II.1.5) ein technisches System. Das einen Modellfall zur Theorie liefernde System wurde für in den fünfziger und sechziger Jahren ausgeführte kybernetische Skulpturen (s. Kap. II.3) maßgebend. "Homeostat" führt die begrenzten Fähigkeiten der Anpassung an Umweltbedingungen im technischen Modell vor. Der Energiefluss im technischen Modell soll zeigen, wie die System/Umwelt-Relation auch bei biologischen Systemen, zum Beispiel zur Erhaltung der Körperwärme, funktioniert. Die Kybernetik entwickelt systemübergreifend gültige Theorien, schafft technische Modelle dafür und vergleicht sie mit Eigenschaften von Lebewesen: von der Theorie zur Maschine zum Lebewesen – und zurück. 1
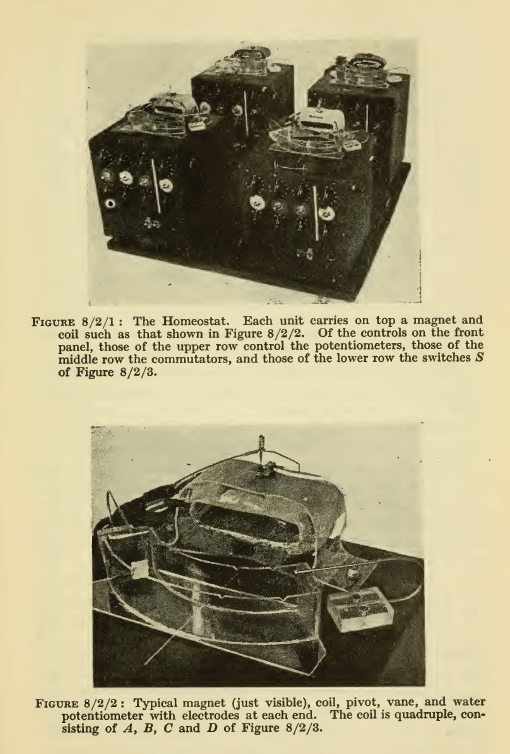
Ashby, William Ross: Homeostat, 1946-47 (Ashby: Design 1960, S.101).
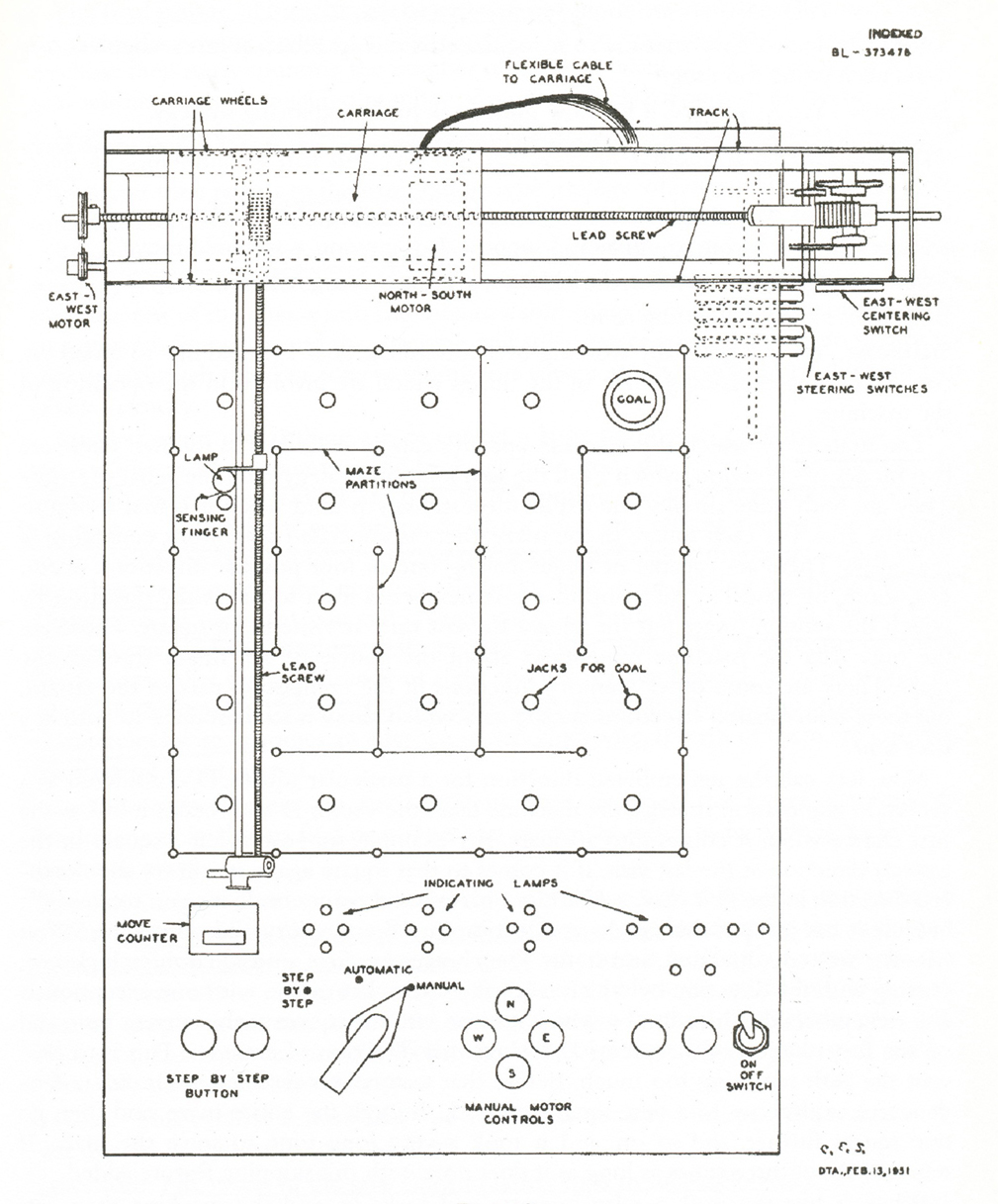
Ashby verbindet im "Homeostat" vier störungsempfindliche und Störungen ausgleichende Einheiten zu einem System. Ein Magnet auf jeder Einheit kontrolliert die Ausschläge einer Nadel, die in einer leitenden Flüssigkeit liegend auf Spannungsschwankungen im System reagiert. "Uniselectors" führen systeminterne Zufallsstörungen ein. Regler ("commutators and potentiometers") an den vier Einheiten ermöglichen die Regulierung der Energie. Das System reagiert auf Veränderungen des Energieflusses im Rahmen seiner Möglichkeiten mit Ausgleichsbewegungen: Der Output einer Einheit wird zum Input der nächsten Einheit. Es ergibt sich ein die Nadeln in der Mitte ihrer Ausschlagmöglichkeiten stabil haltendes Systemverhalten. Ashby bezeichnet diese Selbstregulierung als "Ultrastabilität". 2
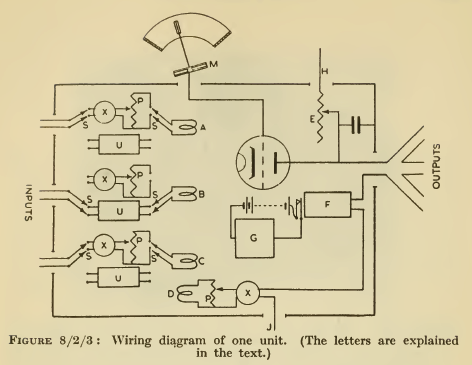
Ashby, William Ross: Homeostat, Schaltplan (Ashby: Design 1960, S.102).
Als Ashby seinen "Homeostat" 1952 auf der neunten Macy Conference in New York vorstellte, sah er sich mit Erwartungen konfrontiert, dass sein System ein "Gedächtnis" 3 besitzen sollte, das vorangegangene Prozesse speichert, um zu Lernen und sie nicht von Neuem ausführen zu müssen. Aus dieser Erwartung und aus der Behauptung, dass die Funktionen eines Entwurfs auch technisch realisiert werden können 4, ergab sich für die Teilnehmer der Macy Conferences die Frage, wie Merk- und Lernfähigkeit technisch umzusetzen sind.
Ein System mit Gedächtnis führte Claude Elwood Shannon 1951 auf der achten Macy Conference vor: Der "sensing finger" der "Maze Solving Machine" 5 merkte sich bereits gegangene Wege und kehrte zu diesen zurück, wenn eine Sackgasse beschritten wurde. Der Weg zum Ziel wurde verkürzt, weil die Suche nicht jedes Mal von Neuem beginnen mußte, während Ashbys "Homeostat" sein Gleichgewicht suchte, als ob er das vorher in gleichen Situationen noch nie getan hätte. Allerdings konnte auch Shannon kein Modell vorstellen, dass aus gemachten Erfahrungen Schlußfolgerungen für neue Suchstrategien hätte ziehen können.
Shannon, Claude Elwood: Maze-Solving Machine, Plan (Shannon: Presentation 1951, S.174, Figure 8).
William Grey Walter baute seinen ersten, sich einen Weg zwischen Hindernissen suchenden Roboter "Elmer" 1948. Walter verwendete für seine Konstruktion Radioröhren, Schaltrelais, Photozellen und kleine Mikrophone. "CORA" entstand drei Jahre später und merkte sich Hindernisse: Die Positionen mit Hindernissen – oder mit behindernden Testpersonen – umging "CORA" bei nachfolgender Wegsuche. Eine Testperson konnte mit einer Trillerpfeife "CORA" signalisieren: In dieser Richtung geht es nicht weiter.
Walter, William Grey: Elmer, 1948.
Die dreirädrige Roboterkonstruktion war nicht nur ton- und berührungs-, sondern auch lichtempfindlich: Sie reagierte auf Reflexe des Lichtes, das auf ihrer Abdeckung befestigt war, durch Richtungswechsel. Die Reflexe des eigenen Lichtes in einem Spiegel ergaben einen Tanz, da der Richtungswechselmechanismus zu wiederholten, versetzten Bewegungen führte. 6 "CORA" bewies den Fortschritt von der "Machina Speculatrix" "Elmer" zur "Machina Docilis" 7 durch ihre Fähigkeit, Hindernisse zu merken und den Weg zu ihrer Garage mit Stromversorgung zu finden: "CORA" gilt als Vorläufer von "Artificial Intelligence". 8
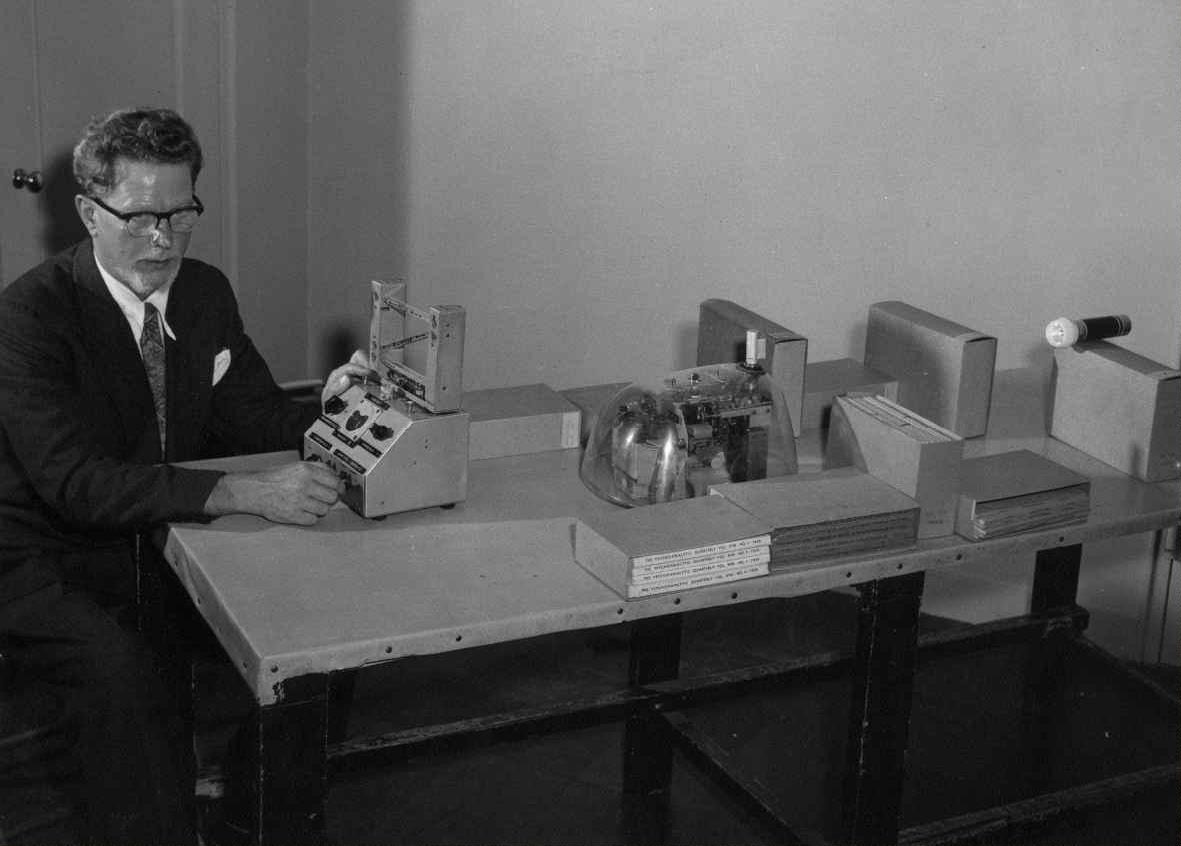
Walter, William Grey: Cora, Modell für Tischdemonstrationen, 1951 (erbaut von Bunny Warren für das Londoner Festival of Britain, Exhibition of Science im Science Museum in South Kensington 1951).
Walter verglich 1953 in "The Living Brain" "an electrical oscillation at low frequency" von "CORA" mit "feedback circuits from cell-group to cell-group" im Gehirn. 9 Er hat Gehirnereignisse als Electroencephalogramm in Zeitphasen gemessen. So liess sich erkennen, ob ein Ereignis vergessen oder gemerkt und verarbeitet wurde. 10
Von Shannon, Ashby und Walter wurden in den vierziger und fünfziger Jahren technische Konstrukte für kybernetische Theorien entwickelt, die auf spätere Entwicklungen mit Programmen für Computer vorausweisen.
Prozesse von Rechnern vom Abakus bis zum digitalen Rechner mit Datenspeicher bezeichnete Wiener als "Computing". 11 Die vorgestellten kybernetischen Modelle differenzieren die Vorstellungen von "computing processes" in auf Umweltereignisse reagierenden Systemen so aus, dass unter anderem auch Künstler in Projekten mit und für Computer daran anschließen können (s. Kap.II.3.1, Kap. II.3.2.3).
Dr. Thomas Dreher
Schwanthalerstr. 158
D-80339 München.
Homepage
mit zahlreichen kunstkritischen Texte, u.a. zur Konzeptuellen Kunst und
Intermedia Art.
Copyright © (as defined in Creative
Commons Attribution-NoDerivs-NonCommercial 1.0) by the author, October 2011.
This work may be copied in noncommercial contexts if proper credit is
given to the author and IASL online.
For other permission, please contact IASL
online.
Wollen Sie dazu Stellung nehmen oder einen eigenen Tip geben? Dann schicken Sie uns eine E-Mail.
Anmerkungen
1 Ashby: Design 1960, S.98f. über den "homeostat" als "analogue computer" für die Untersuchung von "ultrastable systems" und Ashby: Variety 1958, Kap. The Message of Zero Entropy über "the homeostatic mechanism" zur Erhaltung der Körperwärme. zurück
2 Ashby: Design 1960, S.98f.,103f.; Pickering: Brain 2010, S.101-106. zurück
3 Ashby: Homeostasis 1952, S.104/615f.; Bluma: Wiener 2005, S.156f. zurück
4 Ashby: Homeostasis 1952, S.107f./618 mit folgendem Diskussionsbeitrag von Walter Pitts: "At the very beginning of these meetings, the question was frequently under discussion of whether a machine could be built which could do a particular thing, and, of course, the answer, which everybody has realized by now, is that as long as you definitely specify what you want the machine to do, you can, in principle, build a machine to do it." zurück
5 Bluma: Wiener 2005, S.157; Shannon: Presentation 1951. zurück
6 Walter: Brain 1961, S.241: "turn- and- push manoevre".
Über "Elmer": Hoggett: Elmer 2009.
Über "CORA": Hoggett: CORA 2009; Pickering: Brain 2010, S.64-67; Walter: Brain 1961, S.118,155ff.,245-250. zurück
7 Pickering: Brain 2010, S.64; Walter: Brain 1961, S.155ff.,241-244. zurück
8 Holland: Walter 1997.
Nach Reuben Hoggett gab es nicht nur ein statisches Demonstrationsobjekt eines maschinellen Gehirns, sondern auch einen Roboter, der das maschinelle Gehirn integrierte (Hoggett: CORA 2009). zurück
9 Walter: Brain 1961, S.163. zurück
10 Burnham: Modern Sculpture 1978, S.331,334f.; Pickering: Brain 2010, S.64ff. zurück
11 Wiener: Cybernetics 1949, S.20. zurück
[ Inhaltsverzeichnis | Bibliographie | nächstes Kapitel ]
[ Anfang | Index NetArt | NetArt Theorie | Home ]